近日,机电学院葛明峰副教授团队硕士研究生徐景喆以第一作者在工业电子领域顶尖期刊《IEEE Transactions on Industrial Electronics》(IF= 7.515)上刊发研究成果。该文首先构建了一种新型半自主网络化从机器人的遥操作控制系统,并提出了力反馈分层控制框架解决了该系统的同步及编队跟踪问题。
遥操作系统可以使操作人员在安全环境中通过主机器人远程操控从机器人,以完成远端环境(通常为危险或者人类无法到达的工作空间)中的作业任务。目前,相关研究主要是针对单主-单从的双边遥操作系统以及基于集中式控制策略的单/多主-多从遥操作系统,且没有围绕人的决策能力和作业需求开展控制算法的兼容设计工作。但是在实际应用中,可能遇到无法预先估计的紧急情况,需要依靠人类的应急反应能力来引导整个系统做出相应对策。本文提出了一种Human-aided的控制方式,能够在上述应急情况下完成控制过渡。
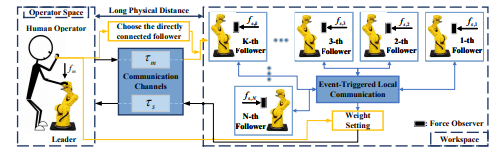
针对以上科学问题,研究团队考虑参数不确定性、扰动、时滞等实际因素,综合分析应急情况下人类操作员决策对系统运动学和动力学的影响,提出了新型的力反馈分层控制框架,并在此框架下设计了相关事件触发控制器和力观测器,解决了该系统的固定时间跟踪控制问题。
该研究成果受到国家自然科学基金(62073301,62703374,61973133)以及中国地质大学(武汉)中央高校基本科研业务费专项资金项目(1910491B05)的资助。
论文信息:
Tilte: Force-reflecting hierarchical approach for human-aided teleoperation of NRS with event-triggered local communication
Authors: Jing-Zhe Xu, Ming-Feng Ge, Zhi-Wei Liu, Wen-Yi Zhang, Wei Wei
Source: IEEE Transactions on Industrial Electronics
DOI: 10.1109/TIE.2021.3068678
Published online: 30 March 2021
论文链接: https://ieeexplore.ieee.org/document/9390311